Yalou Han
Show More
Yalou Han
Show More
Yalou Han
Show More
Yalou Han
Show More
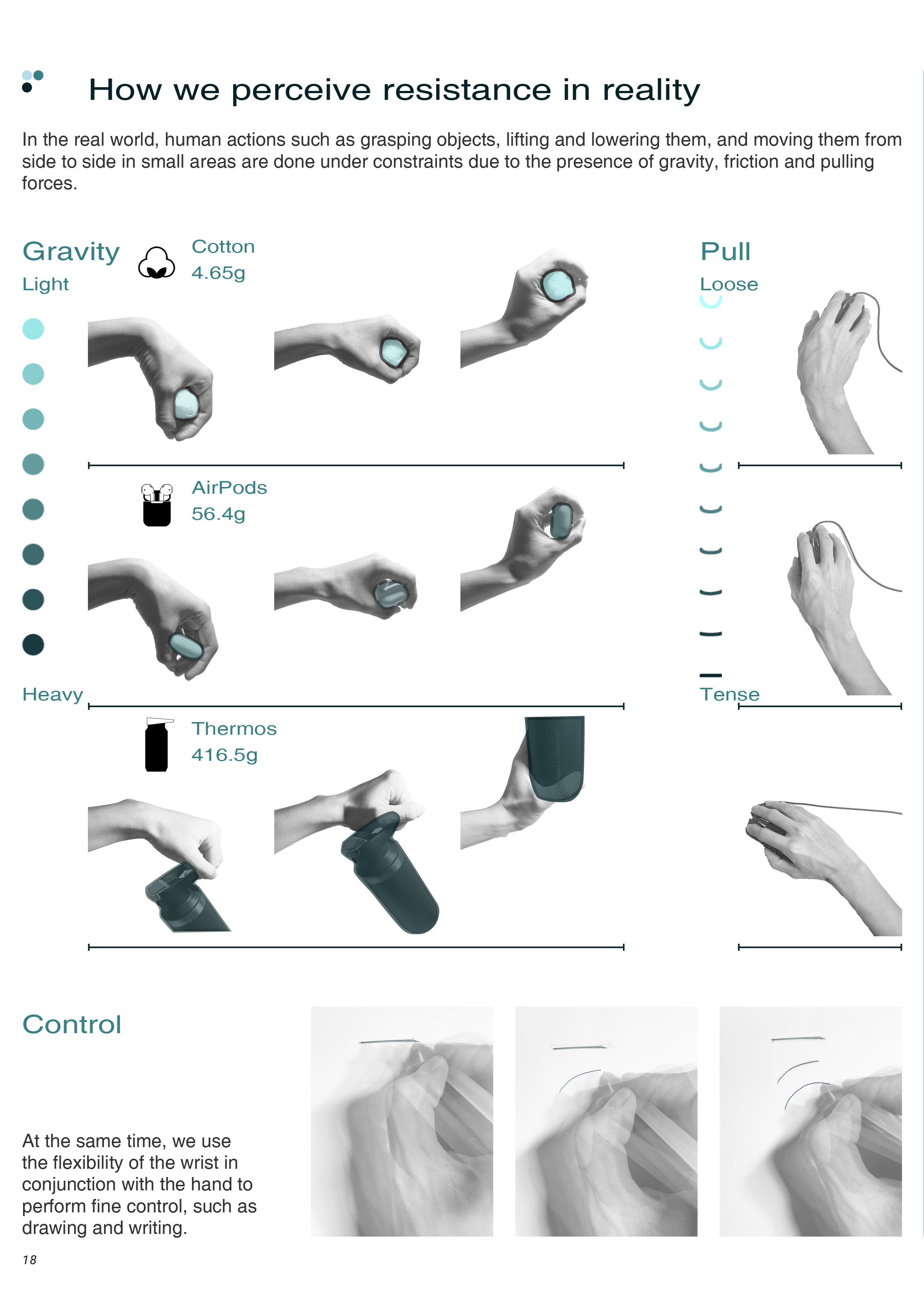
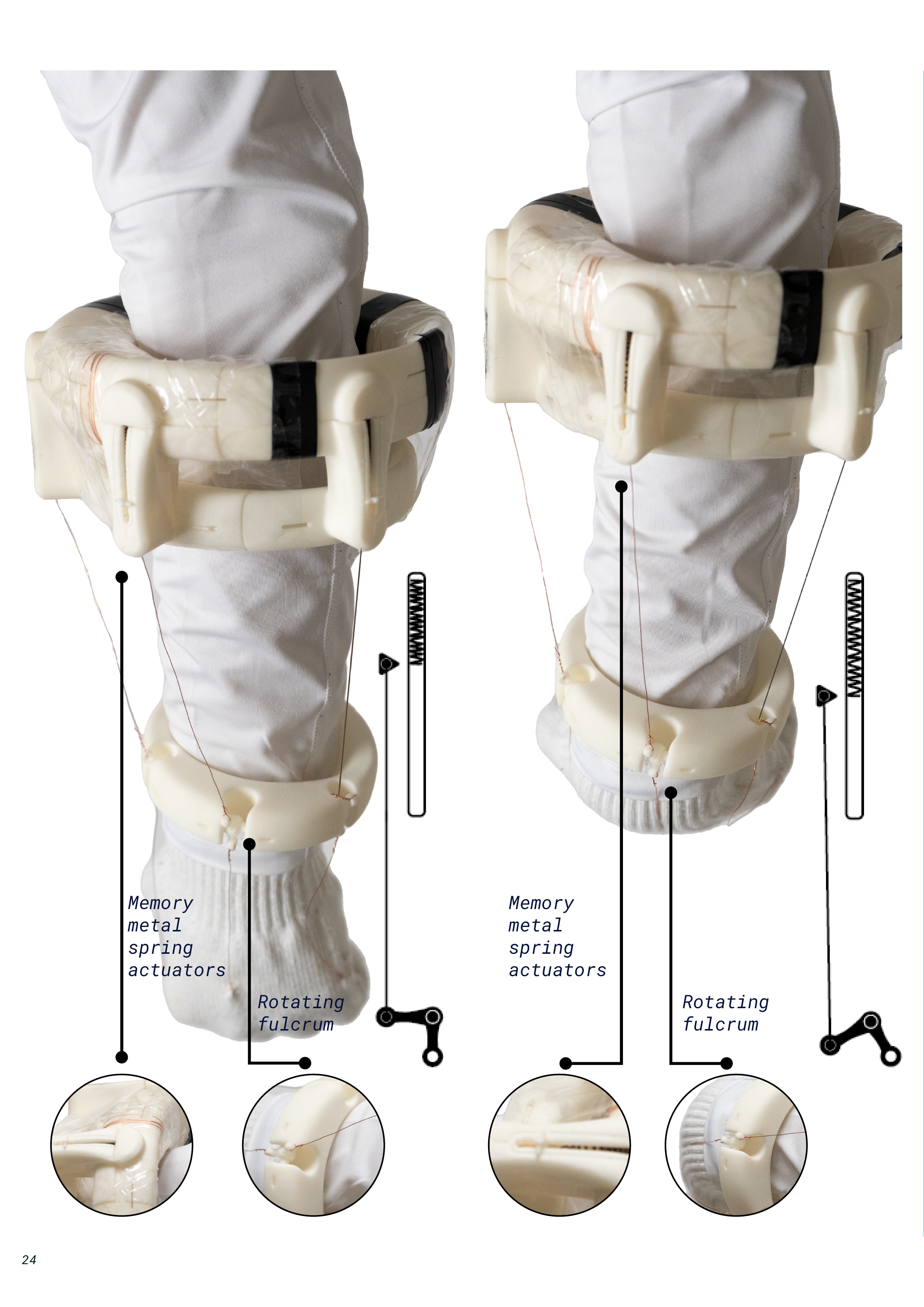
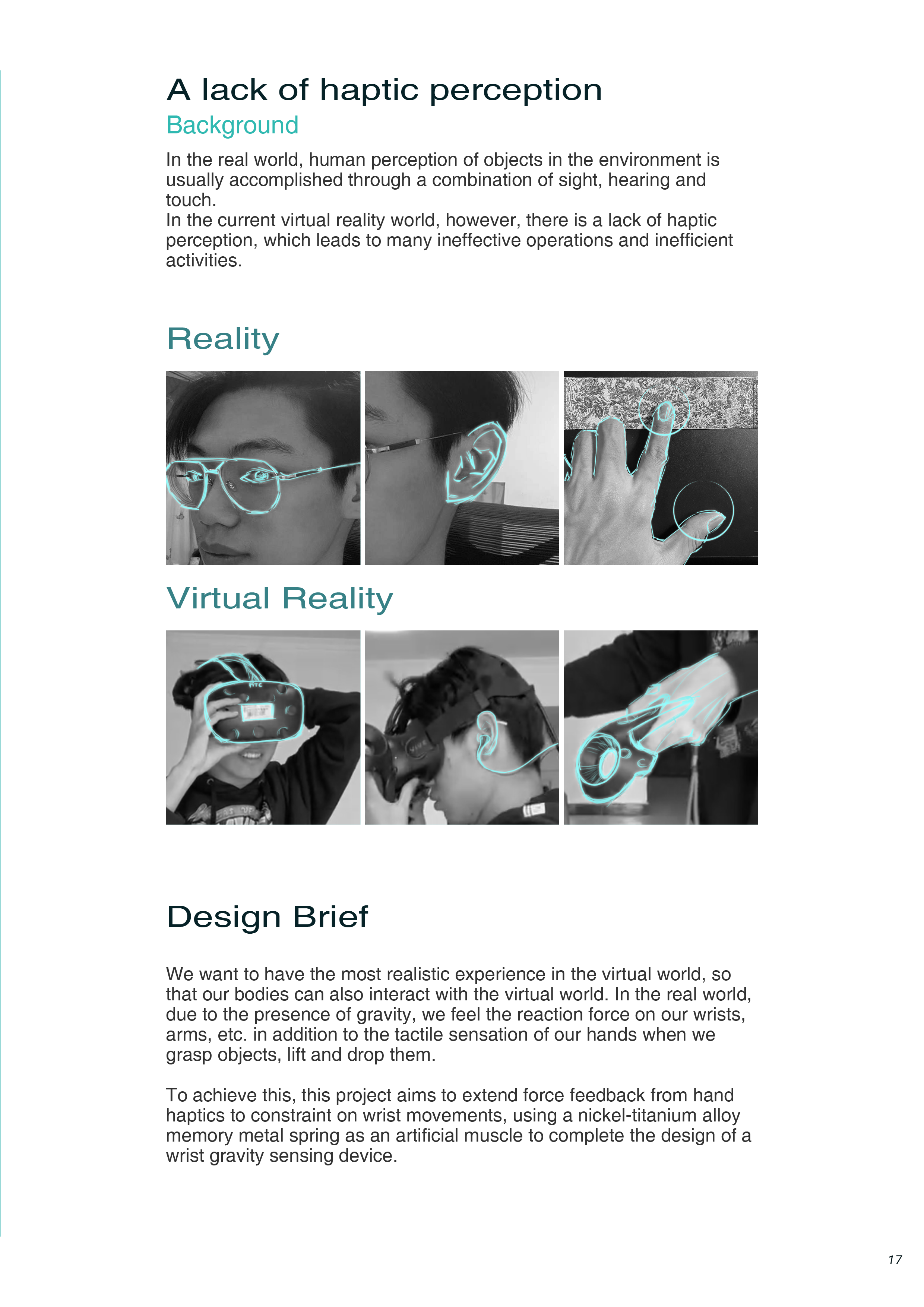
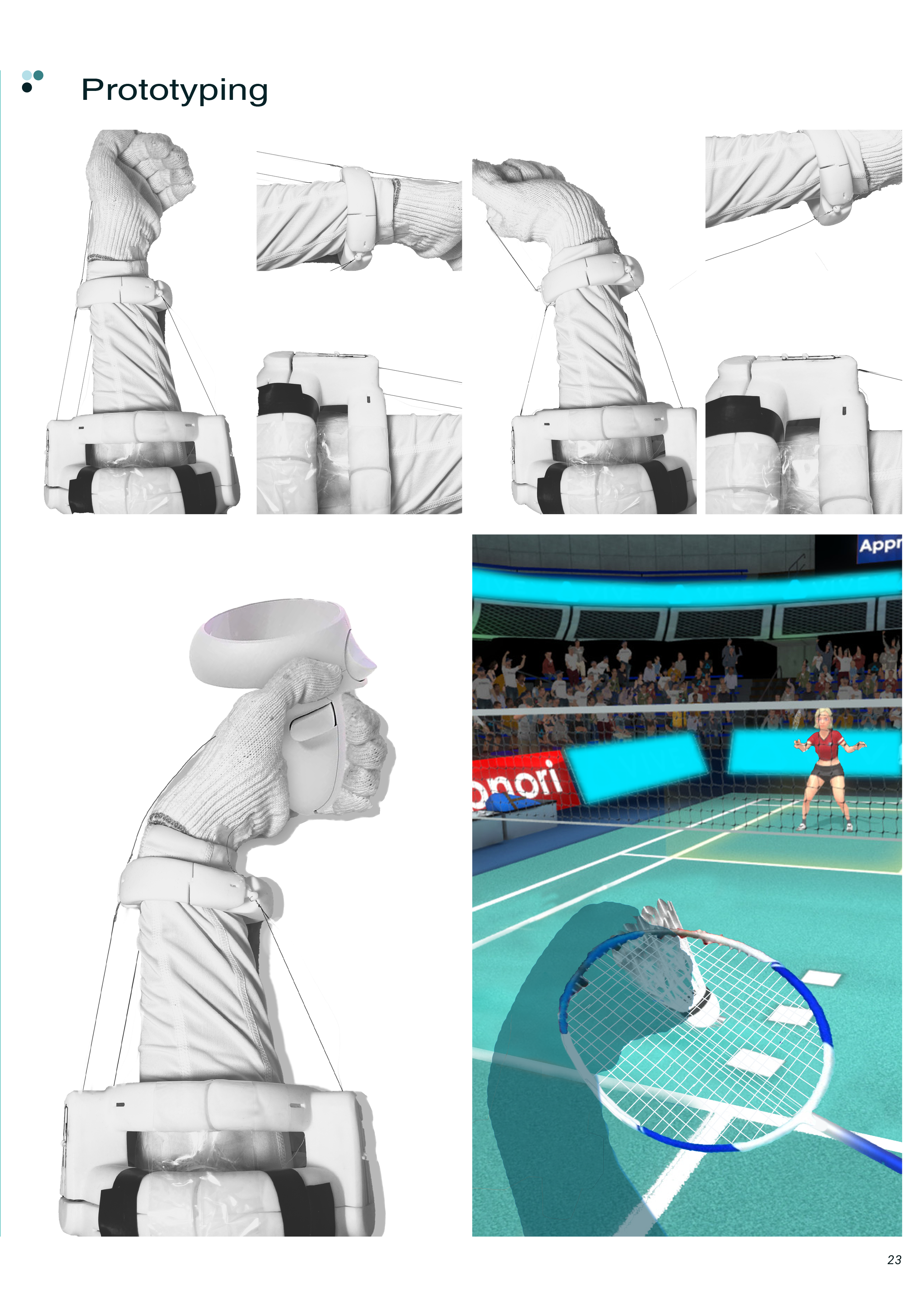
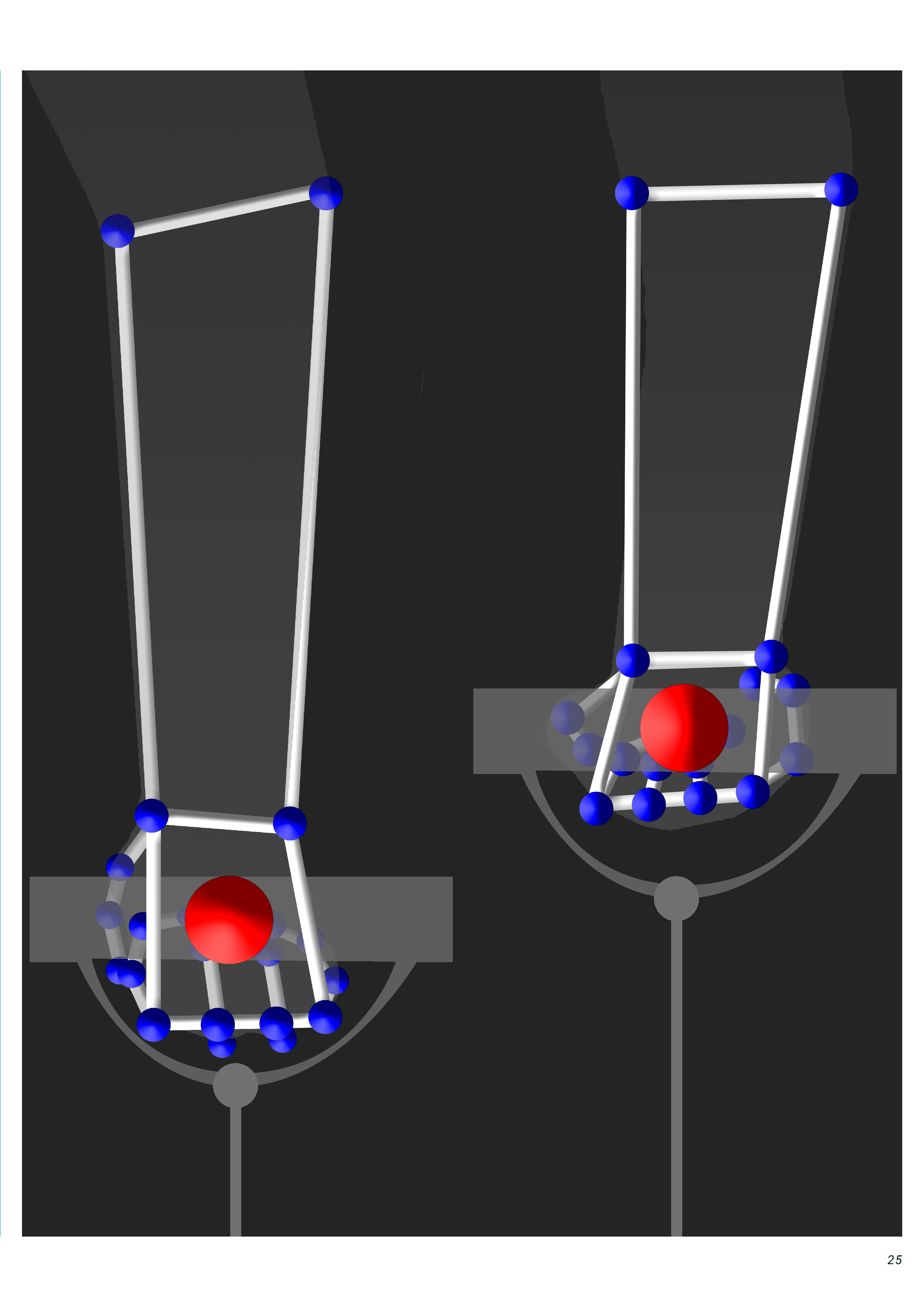
We want to have the most realistic experience in the virtual world, so that our bodies can also interact with the virtual world. In the real world, due to the presence of gravity, we feel the reaction force on our wrists, arms, etc. in addition to the tactile sensation of our hands when we grasp objects, lift and drop them. To achieve this, this project aims to extend force feedback from hand haptics to constraint on wrist movements, using a nickel-titanium alloy memory metal spring as an artificial muscle to complete the design of a wrist gravity sensing device.